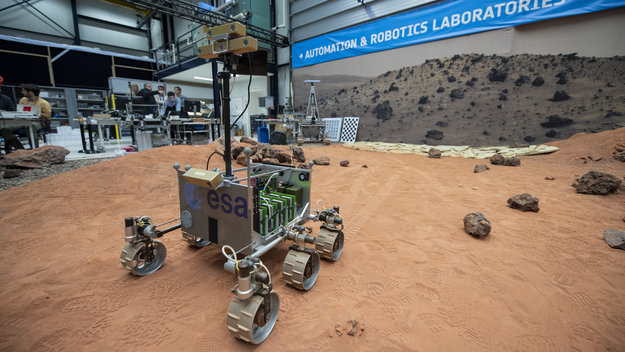
Il software per la navigazione di ExoMars 2020 installato a bordo del prototipo Exoter, ha superato suo primo esame di guida autonoma. Il test, effettuato presso il centro Esa Estec ha testato il sistema di navigazione autonoma sul Mars Yard, un terreno sabbioso e irto di rocce che ricrea lo scenario che Exomars si troverà davanti una volta giunto su Marte. Il prototipo – riporta Global Science – ha raggiunto la velocità di due metri al minuto, superando quella che verrà percorsa del vero Exomars, all’incirca 100 metri per sol marziano. Il compito principale del rover una volta atterrato sul pianeta rosso, sarà quello di effettuare analisi geologiche e biochimiche per caratterizzare la formazione delle rocce in prossimità della superficie e cercare tracce di vita presente o passata. Per farlo, si servirà di un trapano costruito in Italia in grado di perforare il terreno fino a due metri di profondità.
Nel corso del 2017 i Exoter ha fatto tappa in Italia, al centro Altec di Torino, sede del controllo missione per permettere al team di esercitarsi con i comandi. Lo scorso dicembre, Exoter ha fatto ritorno in Estec, per un aggiornamento all’algoritmo della navigazione. Il software di Exoter lavora sulla mappa digitale che il rover crea sulla base delle aree da raggiungere nelle sue vicinanze. Successivamente, il programma cerca di posizionare virtualmente il rover in ognuna di queste zone e di verificarne la sicurezza. Lavorando sulla navigazione locale, il rover riesce a calcolare il percorso sicuro verso l’obiettivo e inizia a muoversi lungo il segmento calcolato, per poi ripetere lo stesso procedimento per le zone successive.
L’installazione di un software di navigazione autonoma è necessaria vista la distanza Marte-Terra che rende impraticabile il controllo diretto del rover dal nostro pianeta. Exoter tornerà presto in Altec per far sì che il team torinese possa esercitarsi sulle nuove funzionalità installate con gli ultimi aggiornamenti. La versione finale di Exomars avrà a bordo anche un secondo software per la navigazione autonoma, sviluppato da Airbus nel Regno Unito che consentirà una maggiore flessibilità del rover durante il cammino nei terreni più accidentati.








