


Dopo due anni di preparativi, il veicolo robotico marino “Proteus”, progettato e realizzato dal gruppo di robotica dell’Istituto di ingegneria del mare (Inm) del Consiglio nazionale delle ricerche di Genova, ha effettuato con successo le sue prime immersioni nel Mare di Ross, nell’Oceano Antartico.
Scopo della missione: dimostrare quanto possa essere utile impiegare un veicolo robotico marino versatile come Proteus per effettuare ricerca scientifica nei freddissimi mari polari, in particolare per svolgere attività di monitoraggio / campionamento in zone inaccessibili all’uomo, o in situazioni particolarmente pericolose.
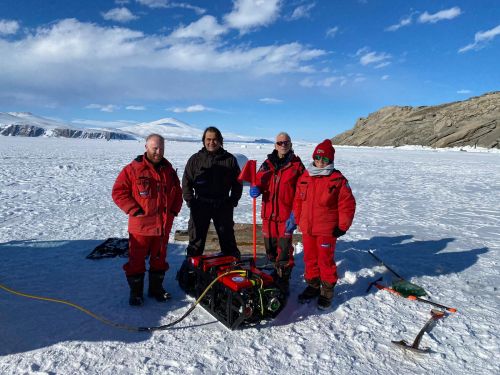
L’attività – svolta “sul campo” da Giorgio Bruzzone (Cnr-Inm), Angelo Odetti (Cnr-Inm), Edoardo Spirandelli (Cnr-Inm), Roberta Ivaldi (Istituto Idrografico della Marina) e Maurizio Azzaro (Cnr-Isp) nel corso della XVIII Spedizione Italiana in Antartide presso la Base Antartica Italiana “Mario Zucchelli” – supportata dal PNRA (Programma Nazionale di Ricerche in Antartide) e finanziata dal MIUR (Ministero Istruzione Università e Ricerca) si inquadra nell’ambito del progetto di ricerca “Restore” (Robotic-based invESTigation and mOnitoring of Ross sEa), del quale è responsabile scientifico l’ing. Gabriele Bruzzone (Cnr-Inm).
“Proteus” (acronimo di Portable RObot TEchnology for Underwater Surveys) è un robot marino tecnologicamente e scientificamente molto avanzato, frutto delle competenze – uniche in Italia – presenti presso l’Istituto di ingegneria del mare (Inm) del Consiglio nazionale delle ricerche di Genova
Una delle sue caratteristiche principali – come suggerisce il nome stesso del veicolo, che deriva da quello del dio marino della mitologia greca che aveva la capacità di mutare forma e assumere qualsiasi sembianza o aspetto – è quella di essere in grado di trasformarsi per adattarsi alle specifiche esigenze richieste dalle diverse indagini scientifiche che deve condurre. Esso, infatti, è stato progettato per avere un’architettura di tipo modulare, componibile e di tipo “aperto”, sulla quale è possibile integrare facilmente qualsiasi tipo di strumento, ad esempio sensori e campionatori. Grazie al peso e alle dimensioni contenute, inoltre, ““Proteus”” è in grado di facilitare le operazioni in ambienti estremi come quello antartico, dove i mezzi di trasporto sono spesso costituiti da motoslitte, gatti delle nevi o elicotteri.
Le attività che “Proteus” è tenuto a svolgere in questi mesi sono molteplici e prevedono tra l’altro:
– la mappatura tridimensionale strumentale, acustica e visiva dei fondali marini e della calotta di ghiaccio presenti a Tethys Bay;
– la raccolta di sedimenti dal fondale marino antartico mediante un piccolo braccio robotico sottomarino;
– la raccolta del micro-strato superficiale dell’acqua marina antartica, mediante un cilindro Harvey, finalizzata al rilevamento di eventuali sostanze inquinanti;
– la raccolta di dati e campioni per lo studio dei fenomeni che si verificano nei pressi dei ghiacciai che sfociano in mare (zone molto pericolose ed interdette alla navigazione per il pericolo di frane di ghiaccio, laddove si può operare solo mediante un veicolo robotico senza equipaggio).
La strumentazione di base montata su “Proteus” è la seguente:
– un sensore inerziale (IMU – Inertial Measurement Unit) per misurare l’assetto del veicolo (angoli di imbardata, rollio e beccheggio) e le tre velocità angolari;
– una bussola giroscopica (FOG – Fiber Optic Gyro) necessaria alle latitudini polari laddove le bussole magnetiche non sono molto affidabili;
– sonda multi-parametrica in grado di fornire misure di profondità, temperatura, conduttività, salinità, velocità del suono in acqua, ossigeno discolto, pH, Eh;
– un sensore (turbidimetro) per misurare torbidità dell’acqua;
– un sensore (fluorimetro) per misurare la quantità di clorofilla;
– una telecamera per il pilota che consente la visualizzazione in tempo reale di ciò che sta succedendo di fronte al veicolo e l’eventuale scatto di foto;
– una telecamera ad alta risoluzione per registrare filmati del fondale o della calotta di ghiaccio (immagini utilizzabili ad esempio per effettuare mosaicking, ricostruzioni 3D, etc.);
– un altimetro acustico per misurare la distanza del veicolo dal fondale;
– un altimetro acustico per misurare la distanza del veicolo dalla calotta di ghiaccio;
– un sensore acustico USBL (Ultra Short Base Line acoustic positioning system) per misurare la posizione del veicolo sott’acqua (è una sorta di GPS acustico, molto meno preciso del GPS, che funziona però sott’acqua);
– un sensore DVL (Doppler Velocity Log) per misurare la velocità del veicolo rispetto al fondale marino;
– un sensore GPS (usato solo quando il veicolo opera in superficie perché ovviamente sott’acqua non è utilizzabile La campagna è iniziata ai primi di novembre e terminerà a metà febbraio. Tutti i dati raccolti dal veicolo “PROTEUS” saranno messi a disposizione della comunità scientifica internazionale e saranno utilizzati per condurre studi chimici-fisici-(micro-)biologici del Mare di Ross, tra gli altri anche quelli relativi ai cambiamenti climatici causati dal riscaldamento globale.
A questa strumentazione possono inoltre essere affiancati, a seconda delle esigenze, ulteriori dispositivi:
– un braccio robotico sottomarino a 4 gradi di libertà dotato di pinza;
– un campionatore automatico finalizzato a raccogliere 8 bottiglie da 1 litro di acqua marina.
Come si può vedere dalle foto della gallery scorrevole in alto, nella prima parte della campagna di acquisizione dati “Proteus” è stato calato in mare a Tethys Bay, nelle vicinanze della stazione di ricerca”Mario Zucchelli”, grazie a un foro praticato nella banchisa (detta anche pack, cioè lo strato di ghiaccio che ricopre il mare nei luoghi particolarmente freddi) che aveva uno spessore di circa due metri e ha lavorato immerso sotto il ghiaccio. Nella seconda parte della campagna, in corso in questi giorni, “Proteus” ha mutato forma ed è diventato un veicolo robotico marino semi-sommergibile al fine di andare ad esplorare e a raccogliere dati nelle pericolose (ma di grande interesse scientifico) zone ubicate nei pressi ghiacciai marini (ghiacciai Campbell, Drygalski, etc.).








