Un robot soprannominato “Morphobot” (M4), progettato per viaggiare su vari terreni sulla terra e nell’aria trasformando le sue appendici tra ruote, eliche, gambe e mani, è descritto in un articolo di recente pubblicato su Nature Communications questa settimana. Il robot, ispirato da animali come uccelli, suricati e foche, può eseguire diverse modalità di movimento per navigare nel suo ambiente, tra cui volare, rotolare, strisciare, accovacciarsi, bilanciarsi e cadere.
I risultati di questa ricerca potrebbero aiutare a migliorare la progettazione di robot in settori diversi, come quelli utilizzati nelle risposte di ricerca e il salvataggio delle persone dopo disastri naturali, le esplorazioni spaziali e la consegna automatizzata dei pacchi. Alcuni animali possono adattare l’uso degli arti per permettergli di affrontare terreni diversi. Ad esempio, i leoni marini possono camminare sulla terra usando le loro pinne, i suricati possono stare sugli arti posteriori per esplorare l’ambiente circostante, e gli uccelli chukar possono usare le loro ali per camminare a quattro zampe su salite ripide. Questi robot hanno la capacità dell’adattamento degli arti degli animali, i robot mobili possono essere progettati con arti multifunzionali per navigare su terreni complessi adattando le loro strategie di movimento.
Il robot ispirato ai movimenti degli animali
Ispirato dagli animali, Alireza Ramezani e colleghi hanno progettato M4, un robot con quattro zampe ciascuna composto da due giunture, insieme a ventilatori canalizzati fissati alle estremità delle gambe. Il robot pesa 6 kg, è lungo 70 cm, e 35 cm in altezza e larghezza 35 cm di larghezza e alto. I ventilatori sono in grado di passare dal funzionamento di gambe, propulsori o ruote. M4 è in grado di adattare i suoi movimenti per camminare su terreni accidentati, attraversare pendii ripidi, cadere su grandi ostacoli, volare a livelli più alti e strisciare sotto sentieri bassi soffitti.
Questo lavoro ha lo scopo di progettare un robot in grado di negoziare ambienti non strutturati, multi-strato con un’ampia plasticità di locomozione, trasformando le sue appendici multiuso per raggiungere diverse funzioni, tra cui ruota, gamba, e propulsore. Il nome di questo robot M4 sta per multi-modale Mobility Morphobot. Questo robot potrebbe essere utilizzato in un ampio numero di applicazioni, comprese le operazioni di ricerca e salvataggio, l’esplorazione spaziale, la movimentazione automatizzata nella costruzione edile e l’agricoltura digitale, per citarne alcuni. Questo tipo di robot potrebbe essere utilizzato nella ricerca e nel salvataggio dopo disastri naturali come terremoti, inondazioni, o tempesta di vento.
Le potenzialità del Progetto M4
L’obiettivo generale del progetto M4 è quello di ottenere una soluzione di scalabilità con ampia di plasticità locomozione. Questo robot ha un design scalabile se la sua capacità di carico può essere aumentata in modo tale che la sua mobilità non è gravemente colpita. Mentre ci sono vari modi per misurare la scalabilità, un approccio fondamentale è quello di valutarlo sulla base del massimo carico utile ammissibile che il sistema può trasportare prima che diventi completamente immobilizzato in qualsiasi modalità.
Ovviamente, la scalabilità dipende diversi fattori, tra cui le prestazioni degli attuatori e dei meccanismi, la modalità di locomozione e le caratteristiche del substrato. Poiché la locomozione multi-modale coinvolge diversi attuatori, meccanismi, modi, e i substrati, il problema di scalabilità può essere molto confondente. La pluralità di attuatori in questi sistemi è molto elevato per giustificare il controllo della postura.
D’altra parte, questi attuatori e queste strutture sono spesso molto ingombranti, per influenzare negativamente la mobilità aerea, che dipende da strutture leggere.
 Eric Sihite et al., Natura Comunicazion
Eric Sihite et al., Natura Comunicazion Fonte: Eric Sihite et al., Natura Comunicazion
Fonte: Eric Sihite et al., Natura Comunicazion Eric Sihite et al., Natura Comunicazion
Eric Sihite et al., Natura Comunicazion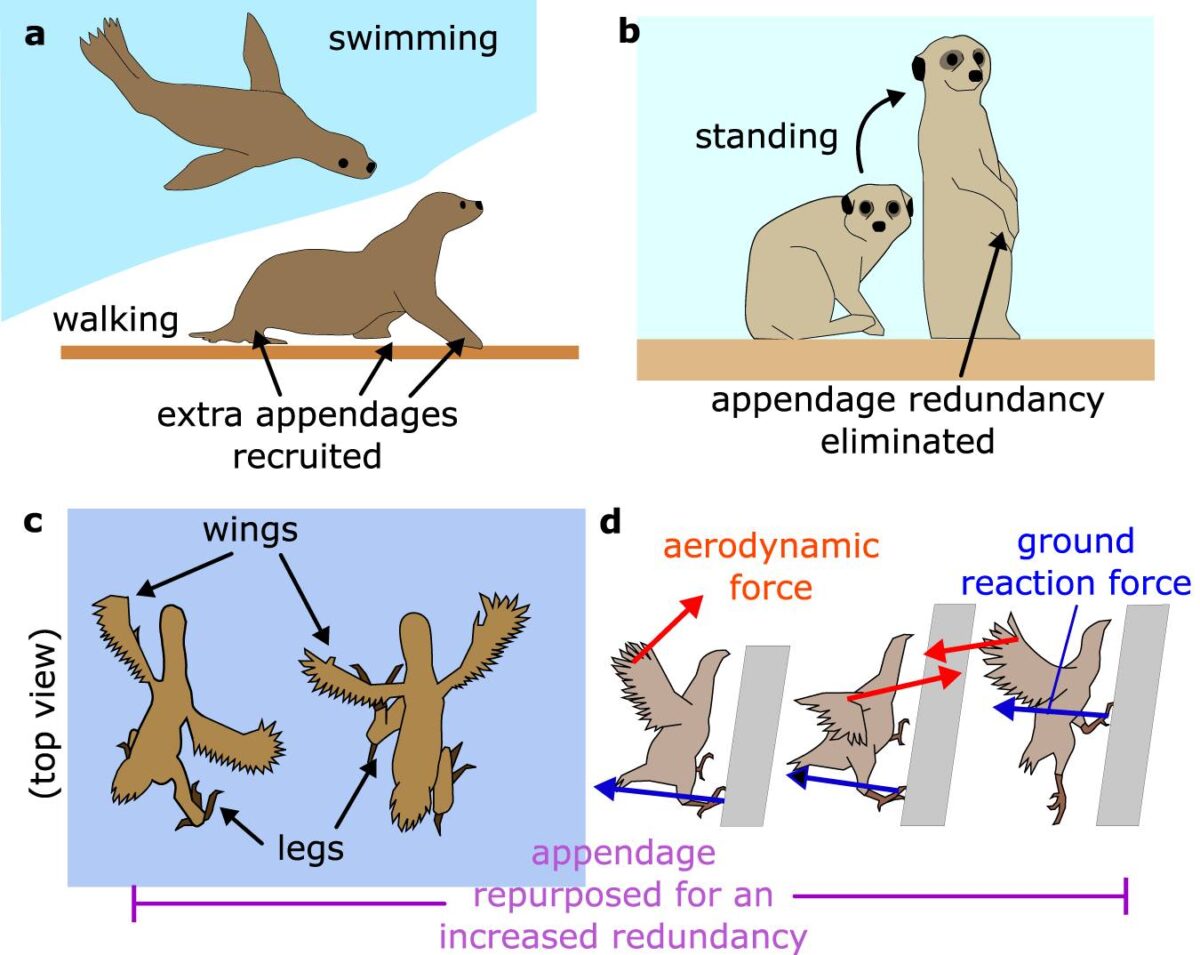 Eric Sihite et al., Natura Comunicazion
Eric Sihite et al., Natura Comunicazion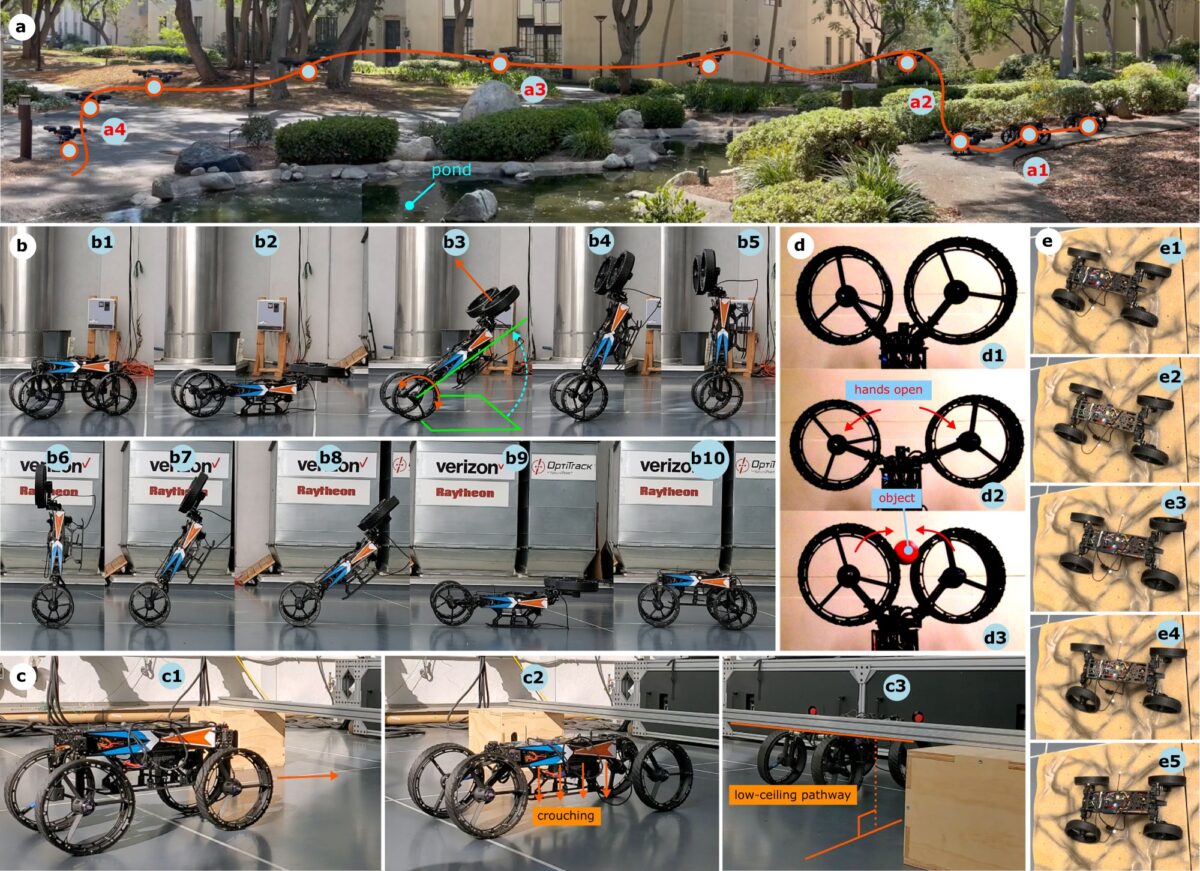 Eric Sihite et al., Natura Comunicazion
Eric Sihite et al., Natura Comunicazion








